Publications
A collection of my research work.
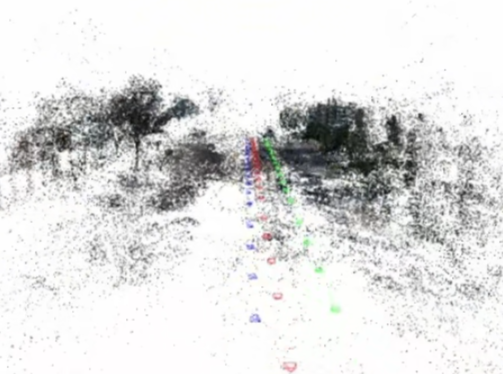
MCGS-SLAM: A multi-camera SLAM framework using Gaussian Splatting for high-fidelity mapping
Zhihao Cao, Hanyu Wu, Li Wa Tang, Zizhou Luo, Wei Zhang, Marc Pollefeys, Zihan Zhu, Martin R Oswald
IEEE International Conference on Robotics and Automation (ICRA) 2026
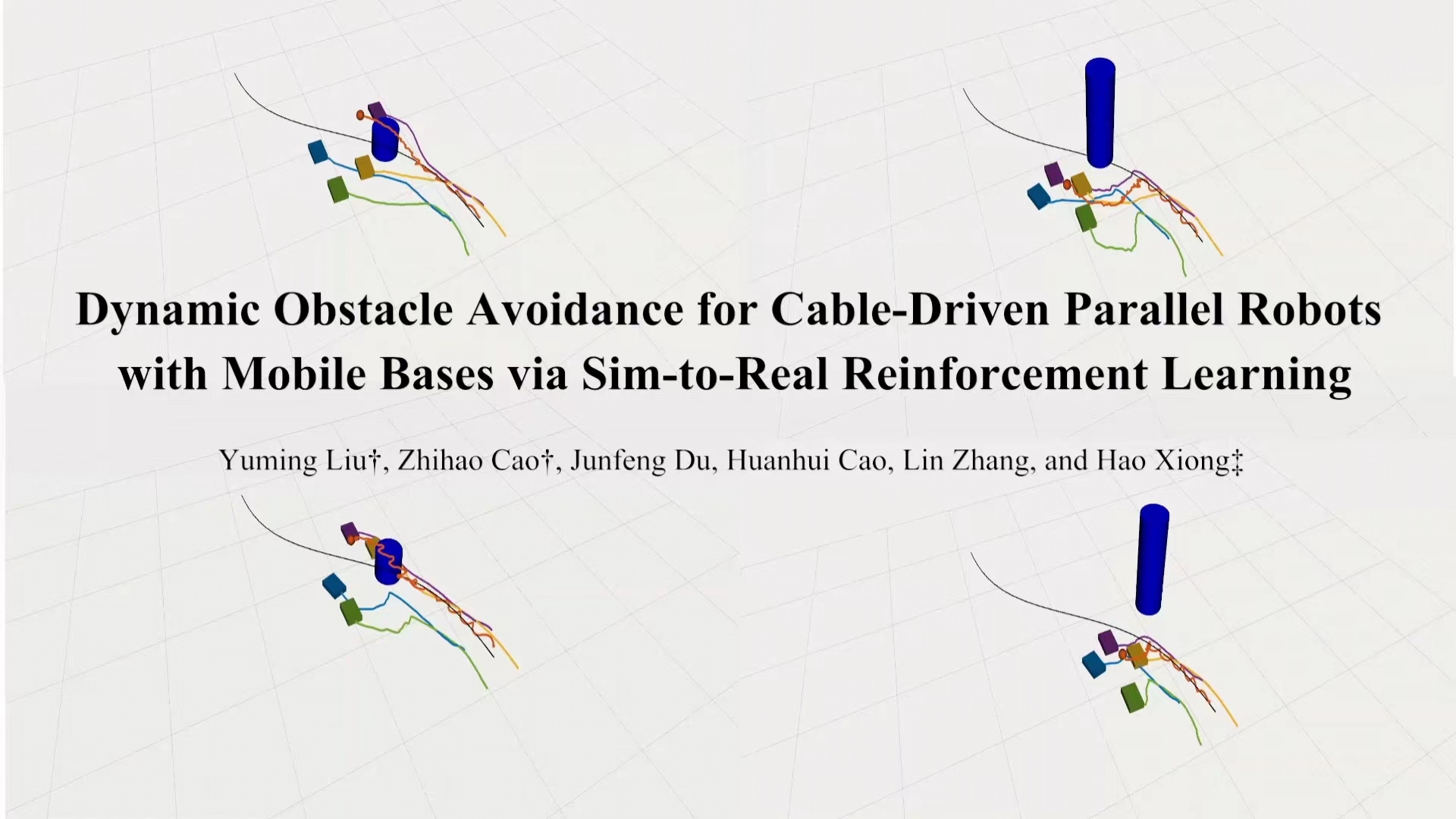
Dynamic obstacle avoidance for cable-driven parallel robots with mobile bases via sim-to-real reinforcement learning
Yuming Liu*, Zhihao Cao*, Hao Xiong, Junfeng Du, Huanhui Cao, Lin Zhang
IEEE Robotics and Automation Letters 2023