
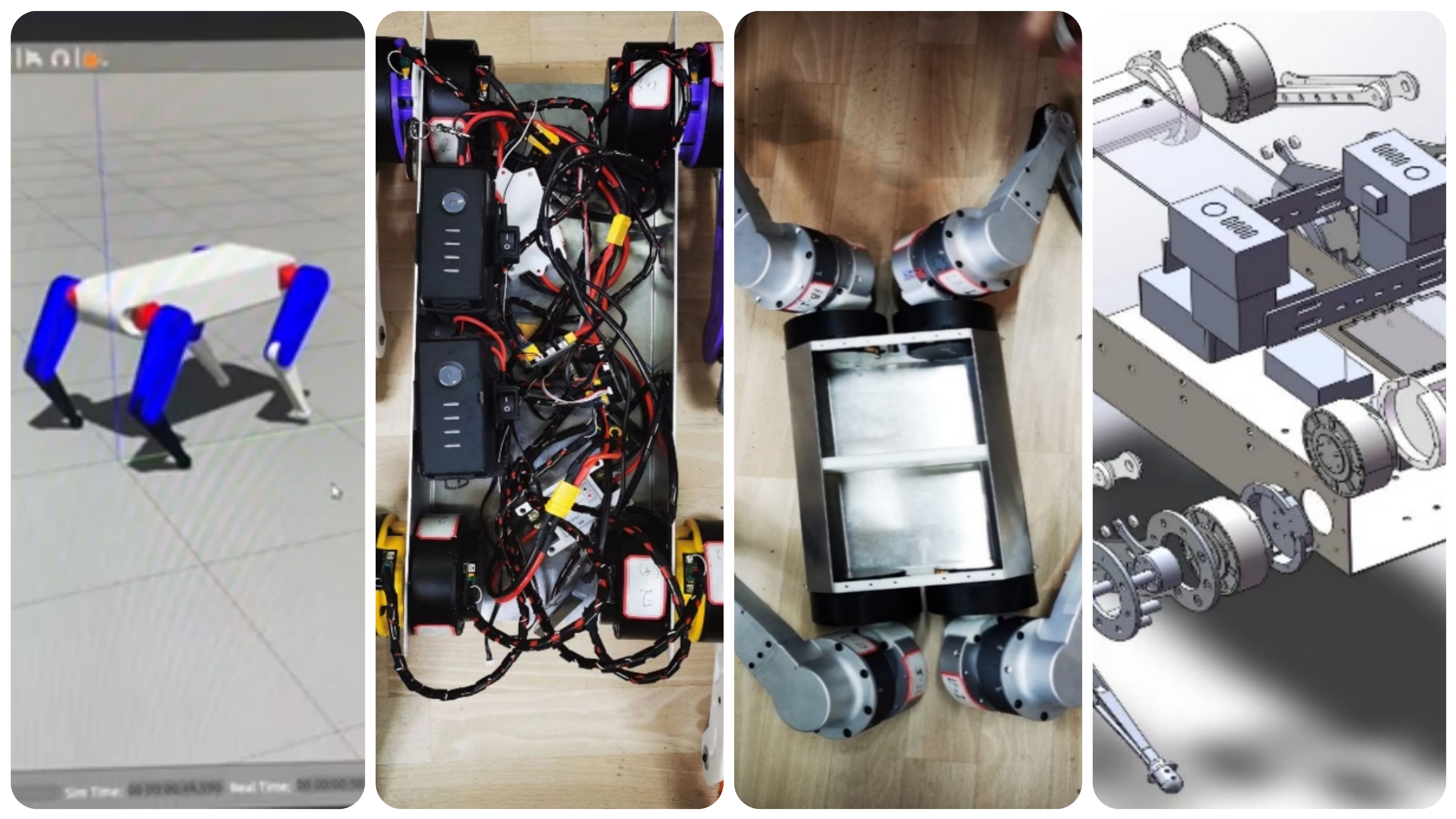
Design and Control of Parallel Quadruped Robot
Learned to design a parallel twevle-degree-of-freedom quadruped robot with SolidWorks and acquired the movement control algorithms by referring to MIT Cheetah. Controlled the robot with the Model Rredictive Control.
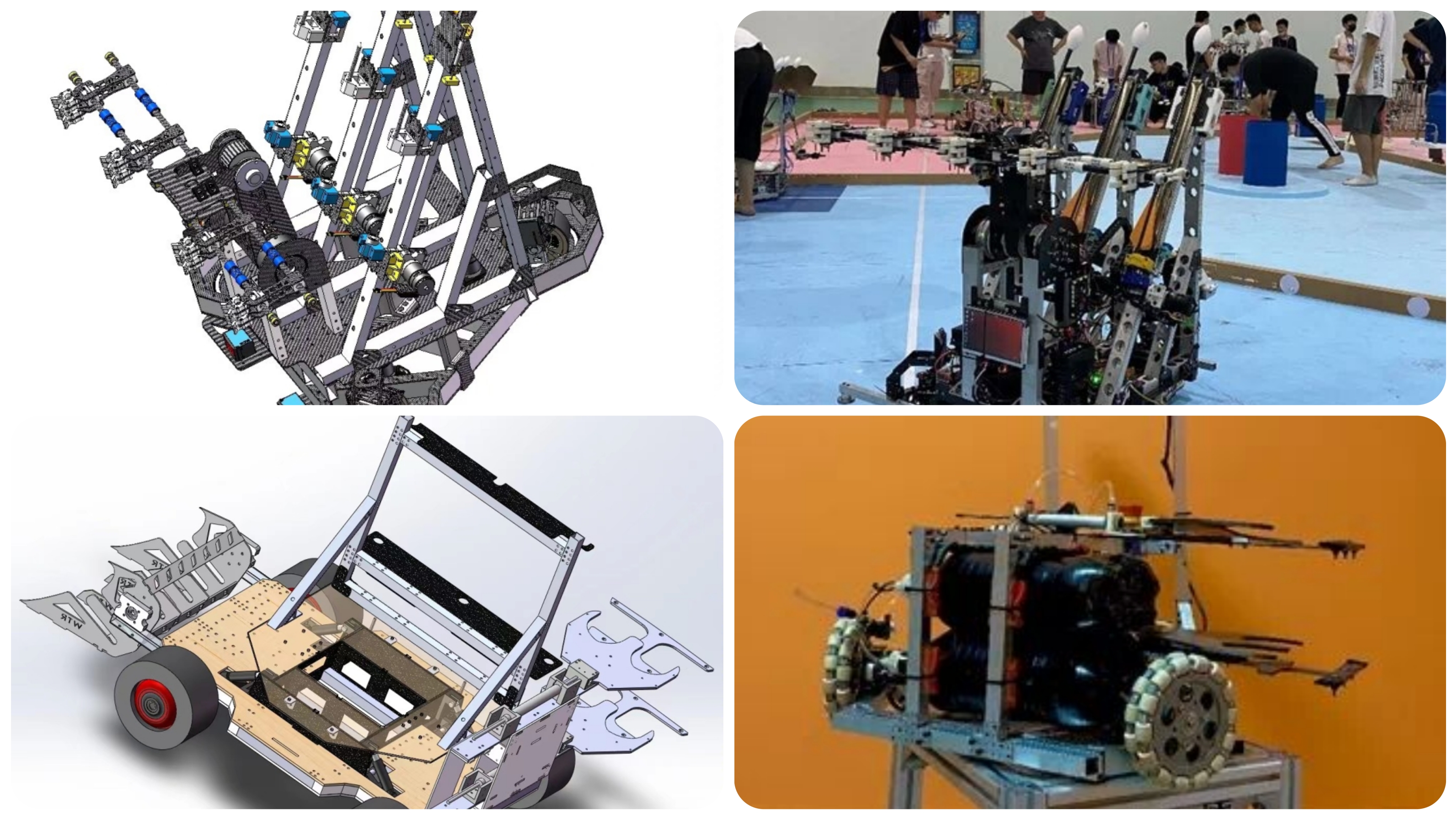
ABU Asia-Pacific Robot Contest (ABU Robocon)
2020: two robots can work together to take balls off the rack and kick them to an appointed area;
2021: two robots can work together to take arrows off the rack, throw them into a pot, and interrupt opponents
National-level First Prize, ABU Asia-Pacific Robot Contest (ABU Robocon), 2020;
National-level Third Prize, ABU Asia-Pacific Robot Contest (ABU Robocon), 2021
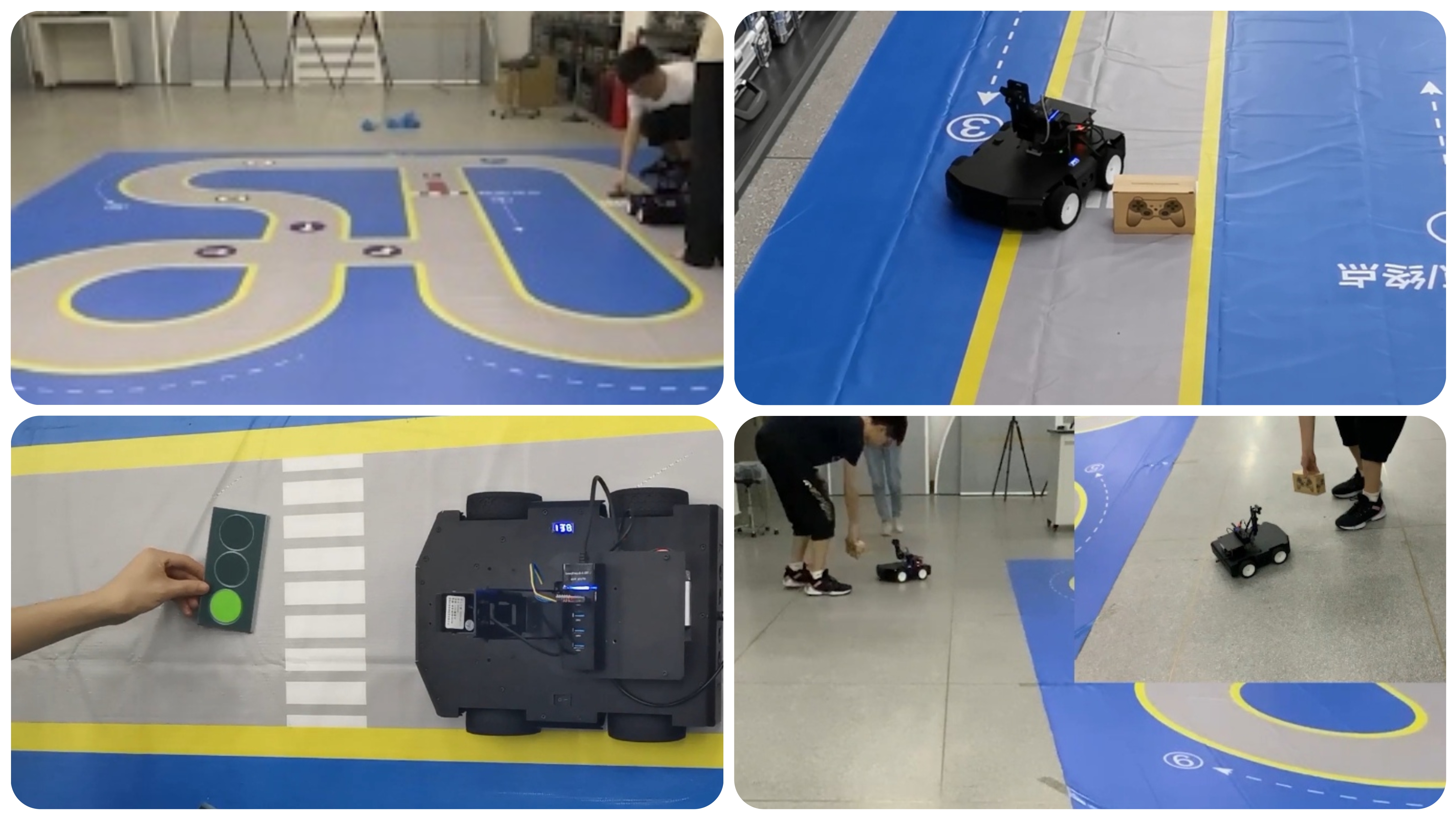
Target Tracking in Complex Field Environment Based on Mobile Robot
Realized the intelligent car's vision-based automatic driving and detected road signs with OpenCV and deep learning (PaddlePaddle),
and sent control instructions to Arduino to realize movements such as turn left or right,
obstacle avoidance and deceleration according to the road signs.
National-level Second Prize, The NXP Cup National University Students Intelligent Car Race
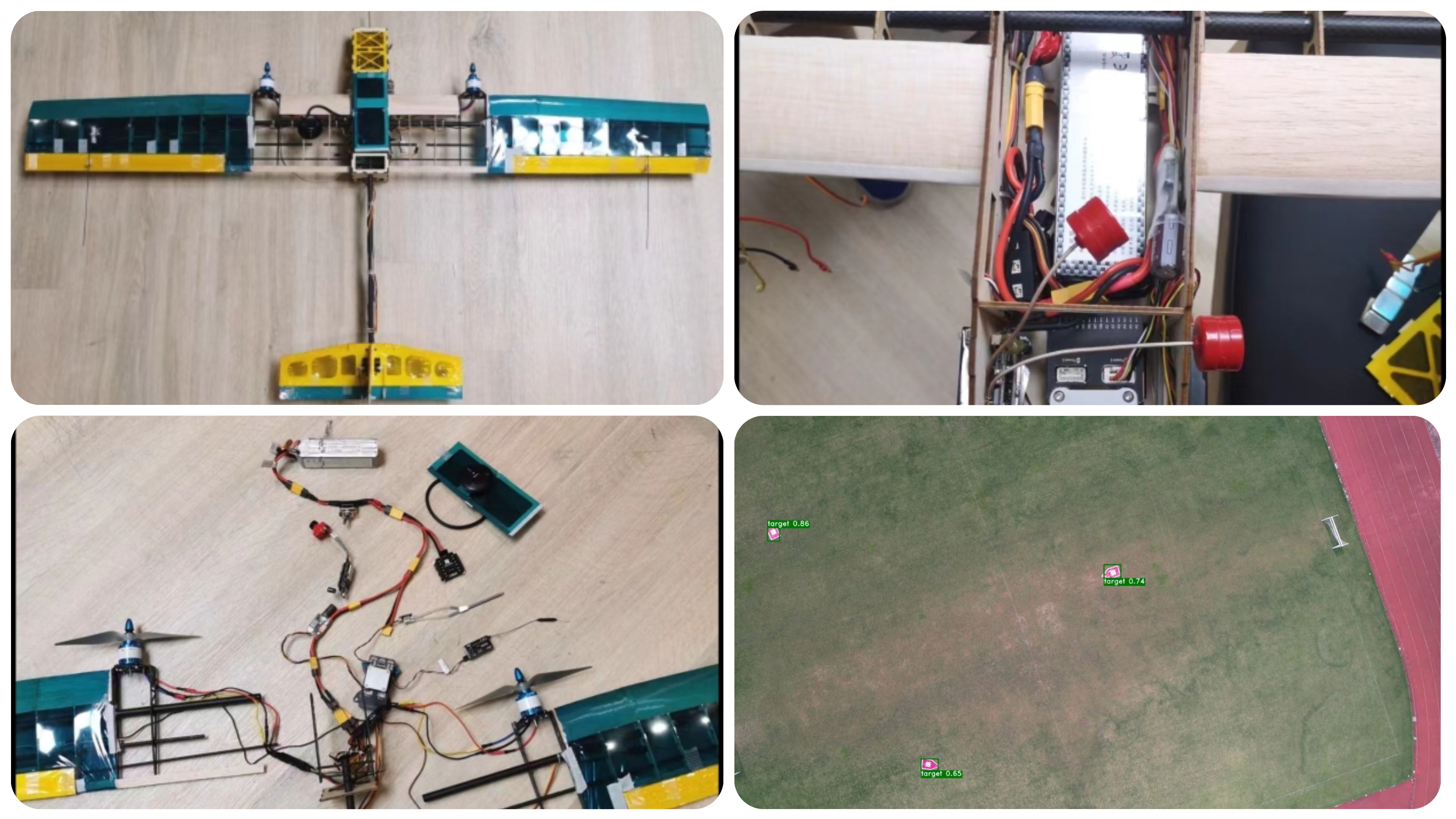
Fixed-wing UAV
Focused on building a fixed-wing UAV, incorporating mechanical design and simulation to optimize dynamic performance. The fixed-wing UAV utilized a PyTorch-based deep learning vision module for target detection during reconnaissance. Upon detection, a mounted water bottle is released for precise target impact.
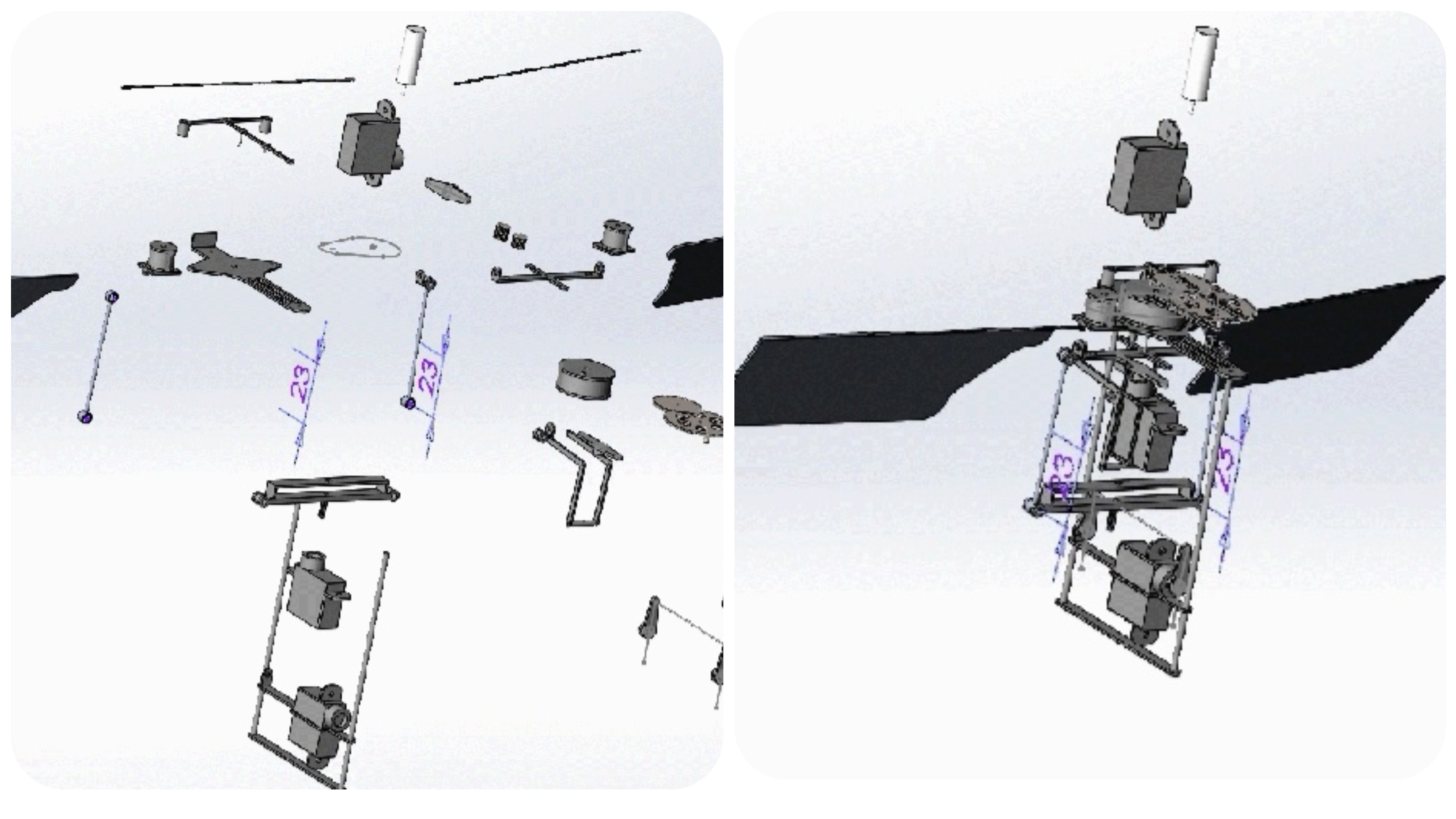
Flapping Wing Robot
focused on building a miniaturized biomimetic flapping-wing robot, inspired by the implementation in the paper "A tailless aerial robotic flapper reveals that flies use torque coupling in rapid banked turns." Completed mechanical design and partial motion control following the referenced paper's methodology.
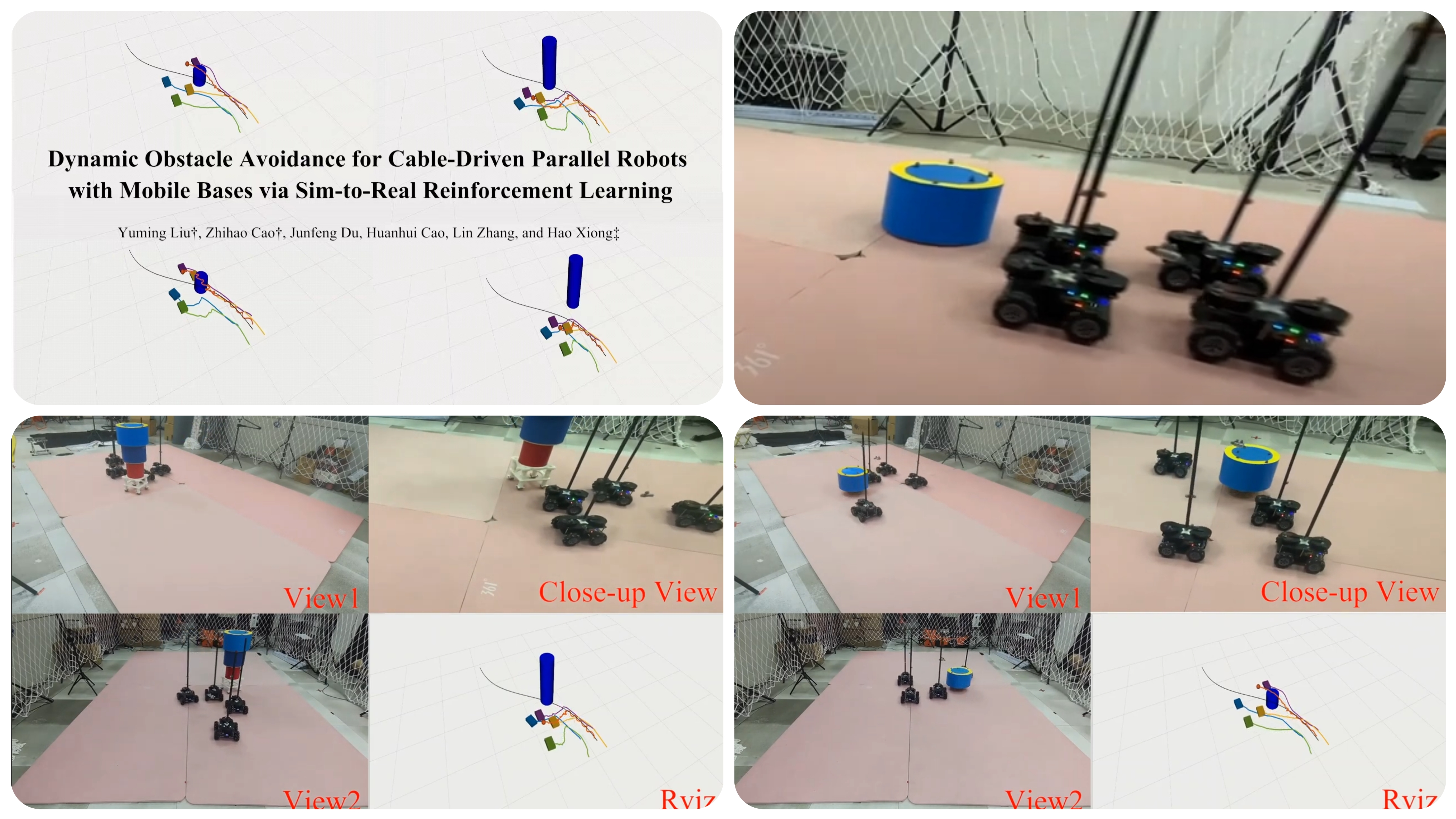
Dynamic Obstacle Avoidance for Cable-Driven Parallel Robots with Mobile Bases via Sim-to-Real Reinforcement Learning
IEEE Robotics and Automation Letters (RA-L) & IROS, 2023
Proposed an RL-based Obstacle Avoidance Controller for a Cable-Driven Parallel Robots with Moving Platform (CDPR with MBs)
to address dynamic obstacles in real time,
and the RL-based OAC is integrated into a Trajectory Tracking Controller for the CDPR with MBs.